In der letzten Woche habe ich mich mit dem Gimbal und der Verbindung zum Pixhawk beschäftigt. Für das DYS Gimbal gab es nur vage Hinweise aber keine gute Anleitung, wie das jetzt wirklich funktioniert.
Deshalb gibts hier jetzt eine Anleitung, wie man sein DYS Smart 3 Gimbal mit dem Pixhawk verbindet.
Also erstmal zu den verwendeten Softwareversionen. Auf dem Gimbal läuft SimpleBGC 2.40b7 und auf dem Pixhawk läuft ArduCopter 3.2 (der letzte RC vor der öffentlichen Beta).
Wie verbindet man das Gimbal mit dem Pixhawk?
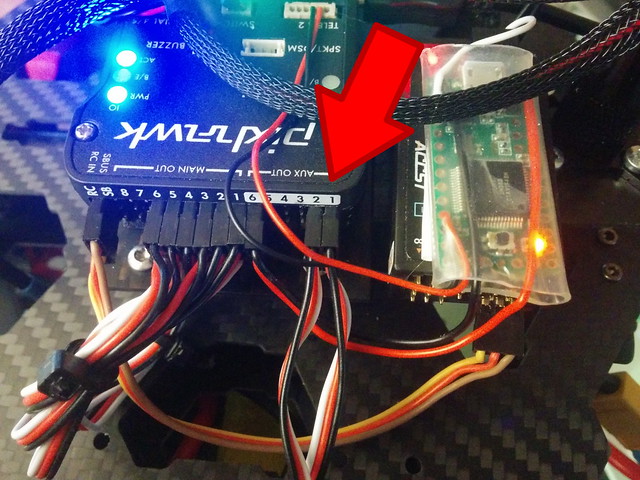
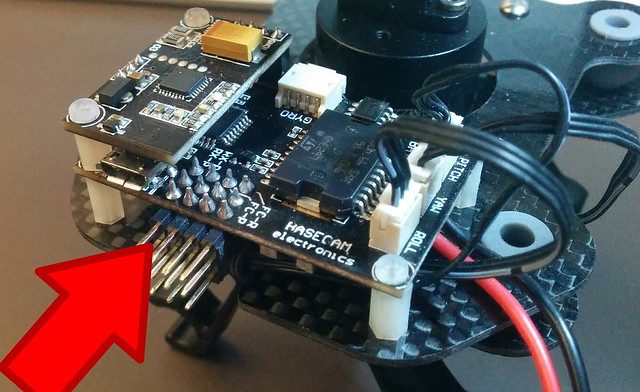
Ich wollte Pitch und Yaw (also die Neigung und Gierung) der Gopro einstellen können. Am Pixhawk habe ich deshalb an AUX1 und AUX2 ein Servopatchkabel angeschlossen. An der anderen Seite des Kabels entfernt man nun die mittlere Buchse (so dass nur die Signal und Ground Leitungen übrig beiben) und schließt AUX1 an RX-P und AUX2 an RX-R an. (P für Pitch und R für Roll aber das bedeutet erstmal nichts.)
Einstellungen in Mission Planner (Pixhawk)
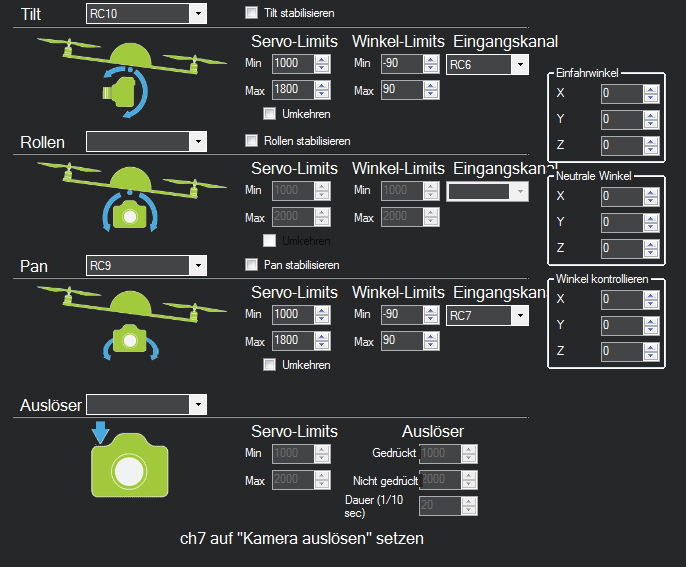
Hier geht man in die Gimbal Einstellungen und stellt bei Tilt (das ist unser Pitch bzw. die Neigung) den Ausgang auf RC10, was AUX2 am Pixhawk entspricht. Den Eingang habe ich auf RC6 gelegt, da müsst ihr aber schauen was eure Fernsteuerung hergibt.
Bei Pan (auch Yaw oder Gierung) legt man den Ausgang auf RC9 (AUX1 am Pixhawk). Der Eingang ist bei mir RC7. Die Servolimits habe ich bei beiden Kanälen auf 1000/1800 gelegt, die Winkellimits betragen -90/90 Grad.
Hier noch ein Screenshot:
Einstellungen in SimpleBGC GUI (Gimbal)
Hier gehen wir zum Tab "RC Einstellungen" und mappen die vorher belegten Pins auf die Achsen, die bewegt werden sollen. "RC_ROLL -PWM" legen wir auf die Pitch Achse und "RC_PITCH - PWM" auf die Yaw Achse.
Unten kann man dann noch zwischen Angle- und Speed-Mode wählen. Angle-Mode steuert direkt den auf der Fernsteuerung gewählten Winkel an. Speed-Mode steuert mit variablen Geschwindigkeiten in die eine oder andere Richtung. Evtl. zeige ich das noch in einem Video.
Hier noch ein Screenshot mit den genauen Einstellungen:

Mir ist es ein paarmal beim Testen passiert, dass trotz der korrekten Einstellungen die Yaw-Achse nicht funktioniert hat, als das Gimbal mit der Software verbunden war. Die Achse funktionierte dann wieder Problemlos nach einem Neustart des Gimbals. Also falls man alles richtig eingestellt hat und die Yaw-Achse nicht funktioniert, nicht verzweifeln und mal das Gimbal neu starten.
Im Tab "Echtzeit Daten" gibt es einen Indikator, der zeigt, ob das Gimbal überhaupt Signale vom Pixhawk erhält. Das ist ganz nützlich beim Testen.