In Teil 1 haben wir den Rahmen gebaut, nun geht es ans Bestücken des Rahmens mit der Elektronik. Vorher aber noch etwas Kaufberatung.
Kaufberatung
Ich verwende Teile, die ich im Sommer 2013 für einen anderen Quadrocopter gekauft hatte. Inzwischen sollte man andere Teile besorgen. Daher erstmal eine Liste mit den Teilen, die ich verwende, und danach ein paar Vorschläge, was man derzeit besorgen sollte.
Hobbyking.com (ca. 110$):
- 4 Motoren TURNIGY D2830/11
- 4-12 Propeller 10x45
- Kabel
- 1 Packung Foam Pads
- 1-2 Akkus 3S 2200-3000mAh 20-30C
- Akkuwarner
- Flight Controller
- Speedcontroller (ESC)
- Optional: Bluetooth Modul
Zusätzlich braucht man einen Sender und Empfänger. In meinem Fall Spektrum DX4e aus einem Kickstarterprojekt und ein OrangeRx R615 von Hobbyking.
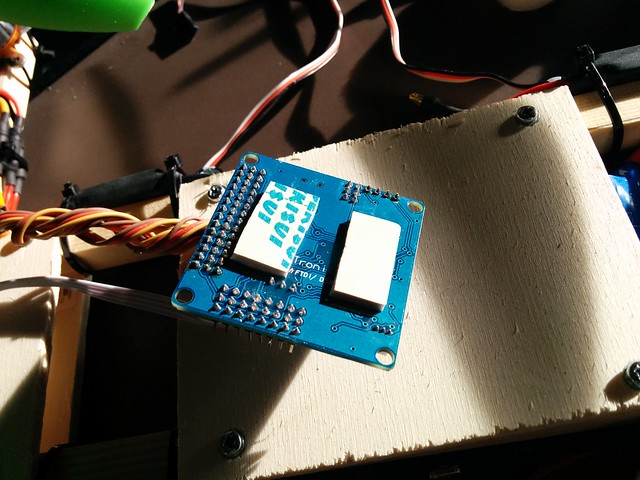
So jetzt zu den Kauftipps. Bei den Flight Controllern tut sich ständig was, hier hört man gutes vom KK2.1 Board. Das Board bringt gleich ein Display und ein paar Taster mit - so werden Einstellungen sehr einfach.
Empfehlenswert dürften auch die NanoWii oder M32 Boards von flyduino.net sein. Hier bekommt man kein Display und muss die Controller entweder per USB einstellen oder ein Bluetooth-Mudul anschließen und sein Telefon/Tablet (Android) benutzen.
Bei den Speedcontrollern will man welche, die schon mit der SimonK oder BLHeli Firmware geflasht wurden. Die Turnigy Plush aus meiner Liste oben muss man selbst (mit BLHeli) flashen. Inzwischen gibt es aber auch fertige bei den Händlern. Empfehlenswert sind z.B. die Afro ESCs bei Hobbyking.
Gegen die Spektrum DX4e Fernbedienung gibt es nicht viel zu sagen, sie funktioniert, ist günstig (ca. 50€) und die Orange Empfänger sind auch günstig zu bekommen. Jedoch ist die DX4e wirklich das untere Ende des Angebots. Ich würde eher eine DX6i (ca. 100€) empfehlen, die bietet 6 Kanäle (DX4e nur 5) und ist komfortabler einzustellen.
Will man später auch mal größere Fluggeräte bauen und einen Rückkanal (Telemetrie), sollte man einen Blick auf die FrSky Taranis oder Graupner MX-16 werfen.
Zu den Motoren kann ich nicht viel sagen, hier sollte man darauf achten, dass die ESCs zu dem Motoren passen. Steht in der Motorbeschreibung, dass er maximal 20A zieht, nimmt man einen ESC der 25-30A aushält.
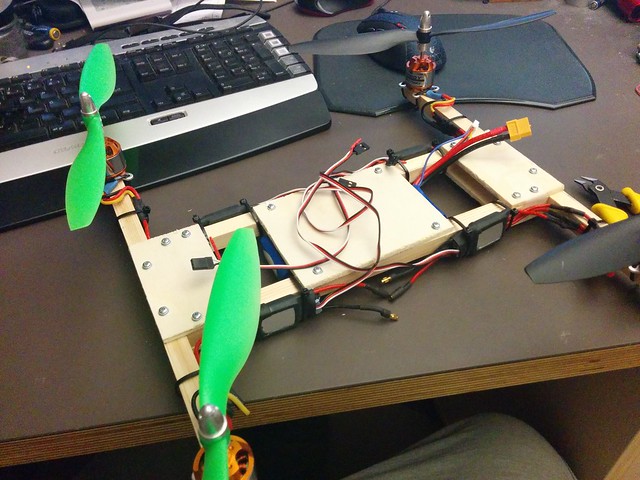
Zusammenbau
Motoren
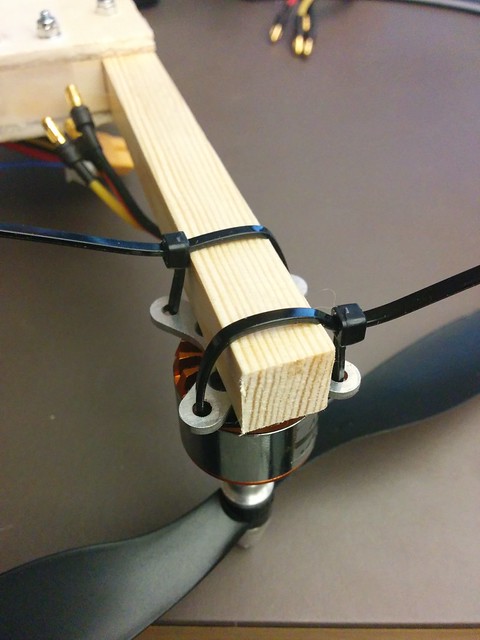
Zuerst befestigen wir die Motoren mit jeweils zwei Kabelbindern an den Armen. Bei den Turnigy D2830/11 wird ein praktisches Montagekreuz mitgeliefert. Falls man andere Motoren genommen hat, sollte man sich etwas überlegen.
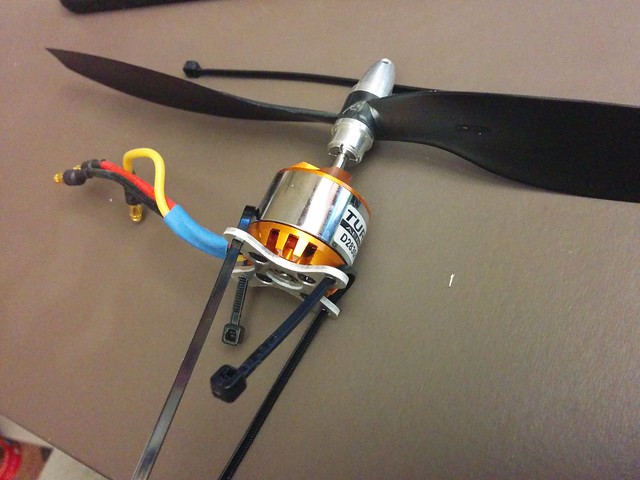
Die Kabelbinder muss man wirklich sehr fest ziehen, die Motoren müssen fest sitzen. Der Kabelbinder sollte auch nicht an der Glocke des Motors (der Teil der sich dreht) reiben, das beeinträchtigt die Leistung des Motors und im schlimmsten Fall schmlitzt der Kabelbinder nach einer Weile durch.
Sollte der Copter mal abstürzen (und das wird er), sorgen die Kabelbinder dafür, dass sich der Motor vom Rahmen löst, bevor dem Motor etwas schlimmeres passieren kann.
Akku
Nun kleben wir einen Streifen Klettband auf den Akku und die Unterseite unserer Mittelplatte.
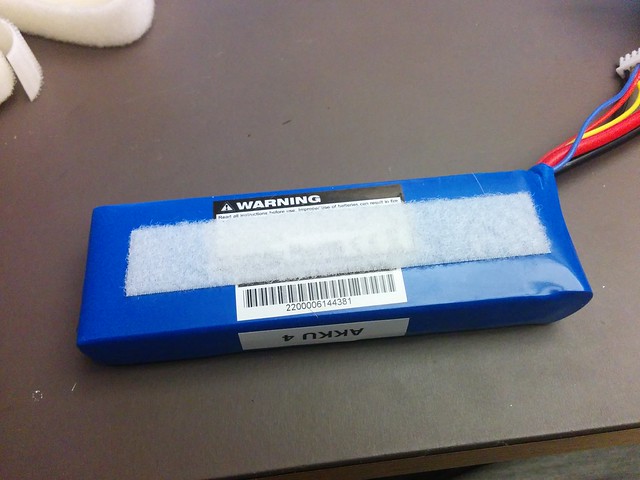


Der Akku wird später noch mit zwei der Sicherungsbänder gesichert, die wir im ersten Teil bei Reichelt bestellt hatten.
ESCs
Die Speedcontroller befestigen wir auch mit Kabelbinder am Rahmen, ich habe jeweils drei Kabelbinder pro ESC benutzt. Es schadet nichts wenn die ESCs im Luftstrom liegen, da sie unter Last auch mal warm werden können und so gekühlt werden.
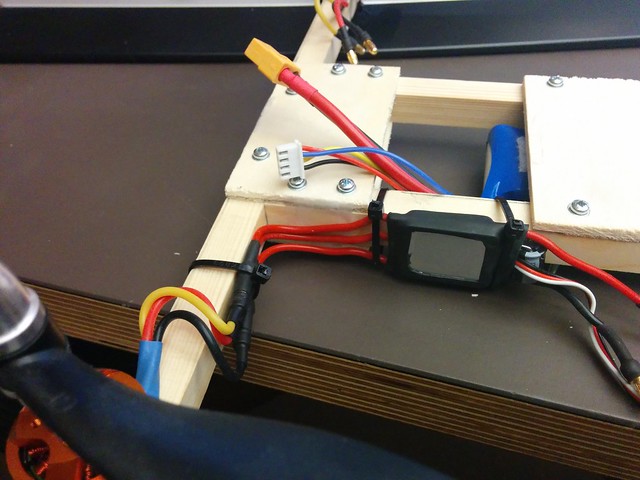
Die drei Motorkabel steckt man einfach an die drei Kabel aus dem ESC. Die Belegung ist erstmal egal. Wenn man alle vier ESCs befestigt hat, kann man das Stromversorgungslabel verlegen und befestigen.
Flight Controller
Hier wird meine Beschreibung jetzt sehr vage, da es stark von der verwendeten Firmware abhängt, wie vorzugehen ist. Grundsätzlich muss der Flight Controller aber gedämpft gelagert werden. Daher schneiden wir uns ein Stück aus dem Sperrholz, das ungefähr so groß, wie der Controller ist. Jetzt kleben wir den Controller mit den Foam Pads an das Stück Holz und befestigen dieses mit Klettband am Rahmen.

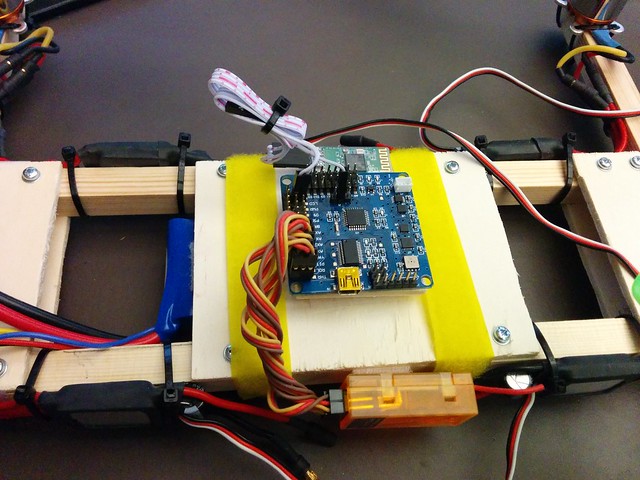
Dann wird alles (Empfänger, Bluetooth, ESCs) angeschlossen und es sollte fliegen.
Falls die ESCs ganz neu sind, müssen sie evtl. noch kalibriert werden, da sollte aber die Anleitung des Flight Controllers helfen. Falls ein Motor in die falsche Richtung dreht, einfach zwei der drei Kabel tauschen, dann dreht er in die andere Richtung.
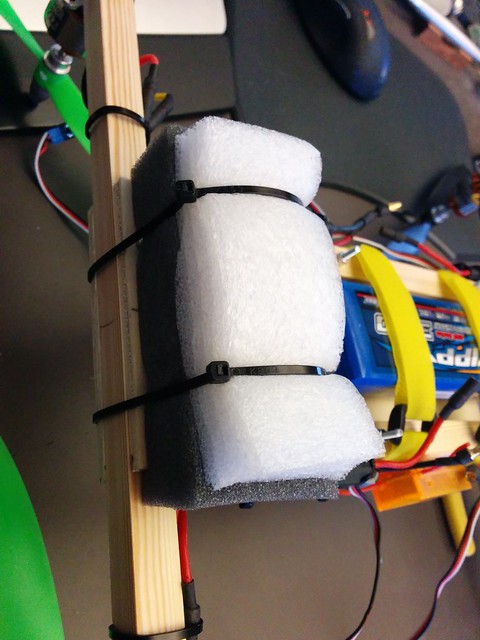
Batteriewarner und Landegestell
Den Batteriewarner kann man an eine beliebige Stelle kleben (Klettband), zur Not geht auch die Unterseite.
Als Landegestell habe ich Schaumstoff benutzt, der mit Kabelbindern an der Unterseite befestigt wird.
Schlusswort
Der Copter muss dann noch etwas eingestellt werden (Stichwort PID).
Verschleißteile sind vor allem die Propeller, da man am Anfang gerne mal gegen irgendwelche Sachen fliegt (Bäume, Zäune, Häuser...).
So das wars, viel Spaß mit dem Gerät!
Verwandte Artikel:
Teil 1 - Bau eines einfachen Quadrocopters - der Rahmen